A team of surgeons and engineers at Inselspital, Bern University Hospital, and the ARTORG Center for Biomedical Engineering Research, University of Bern (Switzerland), have developed a high-precision surgical robot that can perform cochlear implantations, the university announced in a press release. Their results were published in Science Robotics on March 15.
Using an analogy comparing the way in which avionics assist a pilot in flying a plane by communicating cockpit instructions, the university says the surgical robot developed by the researchers for Robotic Cochlear Implantation, or RCI, is capable of performing surgery that a surgeon cannot carry out manually.
In order to embed an electronic cochlear implant device into the ear of a deaf patient, a surgeon has to create a pathway from behind the ear, through the skull bone, all the way into the inner ear, researchers say. The implant electrode that bridges the damaged part of the inner ear is then carefully inserted into the cochlea through the access in the bone. Currently, this procedure is carried out manually with the ear, nose and throat surgeon accessing the cochlea through the opening in the skull bone.

RCI drill trajectory across the mastoid bone. ©ARTORG Center for Biomedical Engineering Research, University of Bern.
Researchers found that the use of surgical planning software and a robotic drill process could allow access to the cochlea through a tunnel of approximately 2.5 mm in diameter in a straight line from behind the ear. However, the size and scale of this procedure meant that the robot could carry out the drilling procedure without the need for direct, manual operation by the surgeon. The challenge for RCI was to design and develop a failsafe safety system that could track and control the robotic drilling activity beyond the capabilities of the human surgeon, without direct visual control.
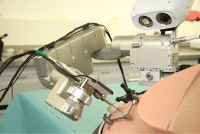
Robot aligned with entry trajectory on phantom head. ©ARTORG Center for Biomedical Engineering Research, University of Bern.
The critical developments that reportedly led to the first procedure on a patient were the reliable, computer-controlled safety mechanisms applied to the actions of the robot when drilling the tunnel into the side of the patient’s head. The minimally-invasive keyhole tunnel runs at a safe distance between the facial nerve and the chorda tympani nerve into the cochlea so that the electrode wire of the implant can be inserted through this opening into the cochlea at the preplanned angle. Through a combination of three interlocking safety components that act as the eyes, ears, and touch of the surgeon, the surgeon was able to safely navigate and drill inside the human ear, avoiding damage to these nerves and the microscopic structures of the inner ear.
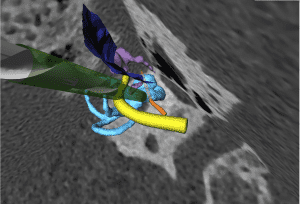
RCI Trajectory for entry into the cochlea at the preplanned angle. Yellow: Facial Nerve, Orange: Chorda Tympani, Light Blue: Cochlea, Dark Blue: Posterior Wall of the External Auditory Canal, Purple: Ossicles, Green: Planned Trajectory, Grey: Robot Drill Bit. ©ARTORG Center for Biomedical Engineering Research, University of Bern.
“The robot relies on a number of sensors which are a high-accuracy, optical tracking system, a sensor for resistance that can ‘feel’ the texture of the bone while drilling, and a radar-like nerve stimulation probe that sends small electric pulses into the bone from which the robot can compute whether or not it is on the preplanned track,” said Professor Stefan Weber of the ARTORG Center for Biomedical Engineering Research, University of Bern.
“This first Robotic Cochlea Implantation is the result of a decade of multidisciplinary research by a team of biomedical engineers, neuroradiologists, neurologists, audiologists, allied health professionals, and surgeons,” says Professor Marco Caversaccio of the Department of ORL, Head and Neck Surgery, Inselspital, Bern.
“Our results encourage us that we have addressed many of the challenges of using a robot for cochlear implantation surgery,” Caversaccio added.
Follow-up developments including drug delivery to the inner ear are being planned. These translational biomedical engineering projects will involve support through the Swiss Insitute for Translational and Entrepreneurial Medicine.
Original Paper: Weber S, Gavaghan K, Wimmer W, et al. Instrument flight to the inner ear. Science Robotics. March 2017; 2(4). DOI: 10.1126/scirobotics.aal4916
Source: University of Bern, Switzerland; Science Robotics
Images: ARTORG Center for Biomedical Engineering Research, University of Bern



Awesome. But has it been approved by FDA or it’s European equivalent. Is it commercially available
Regards
Nauman shah
MBBS: M.Sc ( Audiology,UK)
Registered Audiolgist CASLPO