
The use of active feedback cancellation algorithms in commercial hearing aids is a relatively recent development.1 Today, almost every manufacturer of digital hearing aids use some form of an active feedback cancellation algorithm in their digital hearing aid products. Unfortunately, what “active” means and how effective is the “cancellation” varies dramatically among manufacturers. Making matters worse, there are no standardized protocols for the evaluation of active feedback cancellation algorithms. The most commonly reported criterion is the increase in Available Gain Before Feedback (AGBF).
But AGBF is only one aspect of the performance of an anti-feedback algorithm. An algorithm with a high AGBF may be inadequate when it is evaluated using a different criterion (eg, artifacts or naturalness of sounds, responsiveness to provoked feedback). Understandably, the lack of a clear criterion makes it extremely difficult for dispensing professionals to select the most effective anti-feedback algorithm for their patients.
This article reviews the factors that may limit the performance of a feedback cancellation system. We will explain how the new Inteo hearing aid addresses these issues in its multi-directional active feedback cancellation algorithm, and report on some of its effectiveness data while using different criteria.
How do Active Feedback Cancellation Systems Work?
Kuk et al1,2 reviewed the basics of active feedback cancellation algorithms and indicated the practical limitations of such systems. Briefly, all active (as opposed to passive systems such as fixed gain reduction) feedback management systems have to 1) Identify the feedback sounds reaching the hearing aid microphone, then 2) Resolve the feedback issue using one of two approaches (or both).
Identification of Feedback
In an ideal world, sounds reaching a hearing aid microphone would only comprise of direct environmental sounds that need to be amplified. Unfortunately, in the real world, sounds reaching the hearing aid microphone include both the direct environmental sounds as well as sounds that “leaked through” the hearing aid.
The acoustic path in which the leakage occurs is called the feedback path. The feedback path determines the frequency and phase characteristics of the feedback sound. The amount of sound leakage (or feedback) depends on the damping provided by the earmold/hearing aid shell, etc. If the amount of damping in the acoustic path is smaller than the amount of amplification offered by the hearing aid, more sounds will leak through the hearing aid and be picked up at the microphone opening. This leaked sound or feedback is inaudible to the wearer and is present in all hearing aid use.
However, if this sound is amplified over and over again, its magnitude may become so large that it exceeds the damping and becomes audible as the typical feedback whistling. An active feedback canceling system prevents feedback by either adaptively managing the gain of the hearing aid so that it is lower than the damping offered by the acoustic path, or by canceling the feedback sound before it becomes audible.
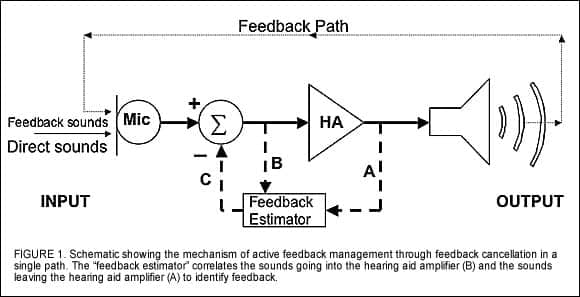
In order to determine if the sounds at the hearing aid microphone originate primarily from the hearing aid itself (eg, leaked sounds through the feedback path), an active feedback system has to perform on-going correlation analyses between the input sounds to the hearing aid (which include both direct environmental sounds and leaked sounds from the hearing aid) and the output sounds from the hearing aid. A high correlation suggests similarity of the two sounds. This is the case if the input sounds to the hearing aid originate mostly from the hearing aid itself—an indication of a feedback signal. A low correlation means the two sounds are dissimilar. This is the case when the input sounds originate primarily from the wearer’s environments and are not feedback. The two lines indicated as A and B in Figure 1 show the paths where the correlation is made.
Two Strategies for Managing Feedback
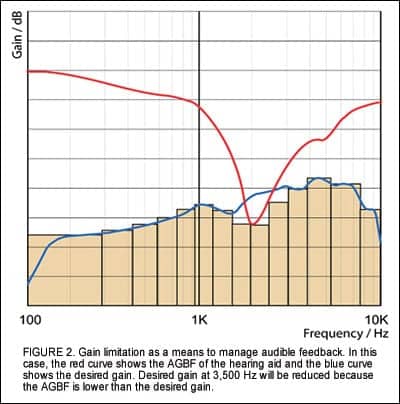
Managing audible feedback by reducing hearing aid gain. One way of actively managing audible feedback (whistling) is to immediately limit or reduce the gain of the hearing aid when audible feedback is detected so it is below the feedback gain limit. Gain reduction is maintained until the condition creating the audible feedback disappears. This is shown in Figure 2 where the insertion gain at 3,500 Hz is temporarily reduced below the feedback gain limit. One may also opt to use a notch filter of a specific frequency width to filter out the feedback frequency.
The advantage of active gain limitation is its responsiveness in managing audible feedback whistling. This is beneficial in situations where there is a sudden change in the acoustic conditions disturbing the feedback path (eg, wearing a hat or moving a telephone handset to the ear). The approach provides fast relief from feedback whistling. Because gain reduction at specific channels (or using notch filters with a specific width) may potentially compromise audibility (and intelligibility) during the time when this mechanism is “active,” systems with a larger number of processing channels may be less compromised than those with fewer independent channels or notch filters with broader bandwidths.
Managing inaudible feedback by removing the feedback sound. The second approach to managing feedback is to remove it from the input before it is even audible to the wearer. This is achieved through the feedback estimator (FE) shown in Figure 1. After feedback is identified, the FE block generates a new sound (designated as “C” in Figure 1) that can be subtracted (or cancelled) from the input sound. For complete cancellation, Sound C should be equal to the feedback sound. Because any changes to the feedback path changes the feedback sound, the FE block is continuously active in order to have an updated estimate of the feedback sound.
The advantage of the cancellation approach is that it prevents the feedback sound from becoming audible by continuously accounting for any changes in the feedback paths. This allows for more AGBF than hearing aids not using such an approach. On the other hand, because many commercial algorithms using this approach are designed to respond to gradual changes in the feedback path, they may not be responsive to sudden changes in the feedback paths.
In summary, the two common approaches to actively manage feedback differ in their responsiveness as well as the potential changes in the available gain. Limiting the hearing aid gain is a quick and effective way to managing audible feedback—but available gain may be sacrificed. On the other hand, canceling the feedback sound before it becomes audible is an effective way to prevent the occurrence of feedback and allow the wearers to use more gain—but this algorithm alone may not be responsive to sudden changes in feedback paths.
The Rest of the Story: Accurately Estimating the Feedback Path
The effectiveness of an active feedback cancellation system depends on the criteria one uses for its evaluation. In an ideal situation where the feedback path does not change, active feedback algorithms can be designed to yield a very high AGBF. In real-life, feedback paths may change unpredictably. Thus, the feedback sounds also change.
An anti-feedback algorithm that yields a high AGBF in one static test condition may not be quick enough to respond to changes in feedback paths to stop audible feedback whistling. Sometimes, “artifacts” and poorer sound quality may occur as a consequence of the anti-feedback algorithm. It is annoying to the wearers if the hearing aid has many artifacts, or if it does not stop whistling (such as when wearing a hat or putting the telephone close to the ear) even though the device may yield a high AGBF.
The following are some reasons why two active feedback cancellation algorithms that report the same increase in AGBF may be different from each other in real life. To a certain degree, these are important considerations when designing an active feedback cancellation algorithm that yields an optimal balance between achieving a high AGBF and freedom from “artifacts.”
How the system handles “uncertainty.” The estimation of the feedback sound can be perfect if the sounds going into the hearing aid are the feedback sounds only. In real-life, the sounds going into the hearing aid are a combination of direct sounds and the feedback sounds.
When the gain in the hearing aid is high, or when the damping of the feedback sound going through the feedback path is low (eg, a lot of leakage), the majority of the sound at the hearing aid input will be the feedback sound. The results of the correlation analysis performed under such a condition have a high likelihood of estimating the actual feedback sound.
In contrast, when the gain of the hearing aid is low, or when the damping in the feedback path is high, the magnitude of the feedback sound will be small when compared to the direct sounds from the environment. Thus, the correlation analysis will have more difficulties estimating the exact feedback sound. Consequently, incomplete or no cancellation may occur.
Under-modeling: The trade-off between complexity and accuracy. In order to completely cancel the feedback sound, one needs to generate the same sound with a very high degree of precision. This is not feasible even in state-of-the-art professional audio recording systems, let alone a hearing aid that has to operate at a limited current drain. Thus, in real-life, hearing aids with an active feedback cancellation algorithm are designed with some degrees of under-modeling (eg, the estimation is not exactly the same as the true feedback signal) in order to be practical. They differ by how much they under-model.
In some conditions, under-modeling of the feedback path may be minimized with a careful design. Typically, it is improved by increasing the precision and complexity of the estimation process, with a greater improvement in AGBF from a more precise or accurate modeling process. Unfortunately, this will increase the current drain on the hearing aid, increase the size of the chip, or both.
Mal-adaptation: Distinguishing “right” from “wrong.” A key characteristic of an active feedback cancellation system is that its operation is dependent on the results of the ongoing correlation analysis between the input and the output. This assumes that sounds leaking from the hearing aids are the only ones with a high correlation. Unfortunately, there are sounds in real-life that would also yield a high correlation under such an analysis. For example, sustained sinusoids, long whistles, or some musical notes that do not change over time could also yield a high correlation. This could mislead the system to identify the input sounds as feedback when there is no feedback. A poorer sound quality results when the mis-identified “feedback sounds” are cancelled from the input.

Another example of a mal-adaptation artifacts is the “phantom sound” generation. This is shown in Figure 3a-c with a state-of-the-art DSP hearing aid in an active feedback cancellation mode. The top half of the figure shows the in-situ output waveform of the hearing aid to a continuous 3,000 Hz sinusoid. The lower half of the graph is the spectral analysis taken at different times. Figure 3a was taken after the sinusoid has been presented for 29 s. A spectral analysis of the output showed the original signal at 3,000 Hz, along with a smaller feedback signal at around 2,400 Hz. When the section was measured at 33 s (Figure 3b), the magnitude of the feedback signal has increased to be the same as the 3,000 Hz signal. That is perceptible as an audible feedback. Figure 3c is the measurement taken 5 s after the termination of the 3,000 Hz input (or at 45 s interval). A spectral analysis showed that this signal was centered at 2,400 Hz. This was the anti-feedback signal that was still being generated to cancel the feedback sound. These observations are not predictable based on the information from AGBF increase.
Rate of tracking: Responsiveness to changes. The changing nature of real-life situations means the feedback path changes continuously and sometimes unpredictably. The changes may be gradual like the “slipping out” of the hearing aid as the day goes on. Sometimes the changes are more abrupt like when a hat is worn or when the wearer hugs another person. In those cases, a fixed rate of estimation of the feedback path may not be responsive enough to the sudden changes in the acoustic conditions even though the feedback model improves the AGBF significantly under the ideal situation. Thus, an active feedback cancellation algorithm must be able to consider these issues in its design—fast rate of adaptation when it needs to be fast, and slow when it can afford to be slow.
Interactions with other algorithms. It is customary to report on the efficacy of a feedback cancellation algorithm when the hearing aid is in a linear omnidirectional microphone mode. The implicit assumption is that other processing features on the hearing aid do not interact with the effectiveness of the active feedback cancellation algorithm so that the observations may be generalized to real-life use of the hearing aids.
Unfortunately, such an assumption is rarely true today. Nowadays, hearing aids that use an active feedback cancellation algorithm almost always use different degrees of complex nonlinear processing and various nonlinear features. For example, the use of wide dynamic range compression (WDRC) and noise reduction on today’s hearing aids would suggest predictable but non-uniform gain changes on the hearing aids, depending on the nature and level of the acoustic inputs in the listening environments. As indicated before, these gain fluctuations could lead to increased uncertainty in the estimation of the feedback sound, and consequently errors in the cancellation.
The use of an adaptive directional microphone system would also suggest the possibility that the changing polar pattern in real-life situations may alter the feedback path characteristics. This means that the feedback cancellation system must be responsive to the changes in the feedback paths consequent to these changing polar patterns. In a similar vein, any audible feedback could alter the polar pattern of the adaptive directional microphone and diminish its effectiveness and/or create artifacts, such as loudness changes or hissing sounds.
These potential interactions have several implications. One is that the AGBF information is “limited” in that it does not reflect the potential interactions among the processing algorithms in real life. Secondly, the information reported on the AGBF will be substantially different in real life. Thirdly, audible feedback and feedback artifacts may occur in real life under the “right” conditions if adequate precautions are not or cannot be taken. Consequently, integration among the different algorithms of the hearing aid is critical if one were to realize the intended effectiveness of each algorithm.
Summary of current situations. The effectiveness of a feedback cancellation algorithm is a reflection of the goodness of the feedback estimation model and how the model manages the changing characteristics of the feedback path. In this process, the complexity of the chip, as well as the considerations paid by its designers to minimize real-world artifacts, would dictate its effectiveness.
A large gain improvement (AGBF) is desirable. However, it is not sufficient for wide application of the algorithm and its effective use in real-life situations. Minimizing the uncertainty of the estimation and any mal-adaptation artifacts, increasing the responsiveness of the system, and integrating the algorithm with other processing algorithms within the hearing aid are means that go beyond simply improving the AGBF of an active feedback cancellation algorithm.
How Multi-Directional Active Feedback Cancellation Works
Recently, Widex introduced Inteo, the first digital hearing aid that uses Integrated Signal Processing (ISP) as its technology platform. ISP uses a coordinated and concerted approach to signal processing so that wearer and environmental information, along with the intermediate results of each processing unit, are shared among other signal processing units in order to achieve the best sound quality and intelligibility without artifacts in most, if not all situations.
In the Inteo, the various processing features are grouped into three functional modules: 1) The high definition sound analysis (HDSA) module characterizes and classifies the nature of the acoustic environments; 2) The high definition sound processing (HDSP) module includes all the processing functions, such as compression, noise reduction, feedback cancellation, etc, and 3) The high definition system optimizer (HDSO) module ensures optimal and efficient operation of all the components and processes within the Inteo hearing aid.
A Dynamic Integrator (DI) coordinates the activities within these three modules and references them to the wearer characteristics so that the output of the Inteo meets the needs of the wearers and their listening conditions (Figure 4). What follows is a description of how the active feedback cancellation algorithm is implemented in the context of the ISP platform.

The spatial feedback tracer (SFT) of the HDSA module analyzes the sound environment to determine the presence of feedback by comparing the input levels measured at the dual microphones. Concurrently, input signals from each microphone are analyzed through correlation with the output to further identify the characteristics of the input sounds. A high correlation between the input and the output suggests a feedback sound, but only if the conclusion agrees with the analysis performed at the dual microphones (that would support the feedback nature of the input sounds). A highly correlated sound that is estimated to be non-feedback at the dual microphones raises doubt on the feedback identity of the sound because continuous stationary signals (such as sinusoids, whistling, or musical notes) may also have a high correlation. Thus, the SFT, by predicting the identity of the input at the microphone openings and integrating the results with the traditional correlation analysis, determines more accurately the presence of feedback sounds and reduces mal-adaptation artifacts.
The Inteo also optimizes the effectiveness of the SFT by using a patented method that adaptively changes its rate of estimation of the feedback sound. This is possible because in some situations, such as high gain and quiet environments, the relative level of the feedback signal is higher and is clearly identifiable. Thus, the rate of estimation can be short. Other more difficult situations (eg, music, whistles, etc) which have a high correlation between the input and the output could be easily confused with feedback, and thus a longer period or a slower rate of estimation is needed.
In order to minimize the impact of the adaptive directional microphone on the feedback path estimation (and vice versa), maximum gain assignment and feedback path estimation is done between the extreme polar patterns formed by the dual microphones. This means that the accuracy of the feedback estimation will not be affected by the adaptive directional microphone. By the same token, any audible feedback, if present, will not affect the polarity of the adaptive directional microphone. This increases the accuracy and stability of the feedback estimation and decreases any tracking errors that may arise from the adaptive directional microphone. From the wearers’ standpoint, this ensures the successful use of both the adaptive directional microphone system and the active feedback cancellation system in more real-life situations. The AGBF is improved.
As discussed, the accuracy of modeling a feedback path (or identifying the feedback sound) is dependent on the complexity of the model. A more complex model yields a more accurate estimation and results in a higher AGBF. Unfortunately, this requires more current drain and chip complexity. To achieve a higher accuracy, the HDSO within the Inteo uses a state-of-the-art chip that is many times more complex than that used in the Diva. Furthermore, using EcoTech II technology (which is a collection of approaches to maximize current efficiency), the Inteo drains at lower than 1.0 mA even with all its features activated. In the CIC version, the current drain is a mere 0.6 mA!
The identity of a specific sound as a potential feedback sound or an audible feedback sound is conveyed to the Dynamic Integrator (DI). This unit integrates the feedback information with other information and informs the multi-directional active feedback cancellation (MDAFC) unit within the HDSP module so it can generate the appropriate feedback management strategy. In the Inteo, two ongoing strategies are used in a complementary manner. For audible feedback that results from a sudden change in the feedback path, immediate gain limitation is used. For gradual changes in the feedback path, feedback sound cancellation is used to cancel the feedback sound before it is even audible. The AGBF is also increased as a consequence.
Other signal processing algorithms within the HDSP module also contribute to the DI. For example, information from the compression circuit is conveyed to the DI so it can ensure that gain fluctuations in the estimation are below that of the compressor. This improves the stability of the estimation and limits the amount of uncertainty errors.
Effectiveness of the System
The integration of the active feedback canceling system into other processing units of the Inteo hearing aid is an example of the application of ISP. When looking at the following data, one should be aware that the data reported here were obtained with the Inteo in its normal operating mode. This means that other adaptive algorithms, such as the speech intelligibility index (SII) optimization algorithm,3 the 15-channel fully adaptive directional microphone system, and the multi-segment compression system with a low compression threshold are active during the measurements. The implication is that the reported results reflect more closely the real-life use of the system.
Increase in maximum available gain before feedback. To measure the potential increase in AGBF, the maximum gain of the Inteo IN-9 hearing aid (set for a flat 80 dB hearing loss and fit with a free-field earmold) in the “Feedback On” and “Feedback Off” conditions were examined on the SoundTracker in an IAC sound-booth.

Figure 5 shows the individual increases in AGBF. There is a wide range of AGBF increase between 2,000-4,000 Hz from as little as 8 dB to as much as 19 dB. An average of 12-13 dB was noted for the group. No increase in AGBF was noted below 1,000 Hz, possibly because feedback usually occurs above 1,000 Hz and target gain is typically reached below 1,000 Hz (thus, no need for gain increase). Nonetheless, the increase in AGBF allows the majority of wearers to achieve their desired gain without feedback in many more listening situations. The ability to use the target gain more consistently could result in better speech intelligibility, better sound quality, and a hassle-free listening experience. In addition, an even larger vent diameter may be used successfully to reduce the occlusion effect (if any) that has a shell origin. The additional gain increase will also result in a “purer” sound by allowing a higher feedback margin.

No or minimal audible feedback when provoked. The increase in available gain before feedback addresses the long-term benefit but not the short-term stability of the active feedback system. To assess the performance of the active feedback system to sudden changes of the feedback path, we placed a telephone handset to the subjects’ ear and noted if feedback was audible. In cases where feedback occurred, we also noted the time it took for the audible feedback to stop. The data from 17 subjects (or 34 ears) wearing the hearing aids (8 wore open-fitting élans and 9 wore ITCs and BTEs with 1-3 mm vent diameters) is shown in Figure 6. Feedback whistling was absent in 28 of the 34 ears (84%) even when the handset was placed directly on top of the hearing aid and the pinna. Almost half of the cases were open-fitting élans. In cases where feedback was noted, it stopped within fractions of a second (estimated to be within 0.2 s). This suggests that the active feedback algorithm is responsive to sudden changes in the feedback path. This ensures that its wearers can more consistently use the hearing aids in more diverse listening situations.
Freedom from mal-adaptation. As discussed, mal-adaptation artifacts include situations where the feedback algorithm mistakenly cancels the “non-feedback” direct signals (eg, whistling, music) or generates a feedback cancellation signal after the termination of the direct sound. In the former case, one may ask the wearers to rate the sound quality of music between feedback “on” and “off.” There should not be any quality difference between the two conditions if there are no mal-adaptation artifacts. In the second case of generating a signal (if that occurs), one should be able to measure the in-situ output of a hearing aid and examine the in-situ response after the termination of the “feedback-like” stimulus.
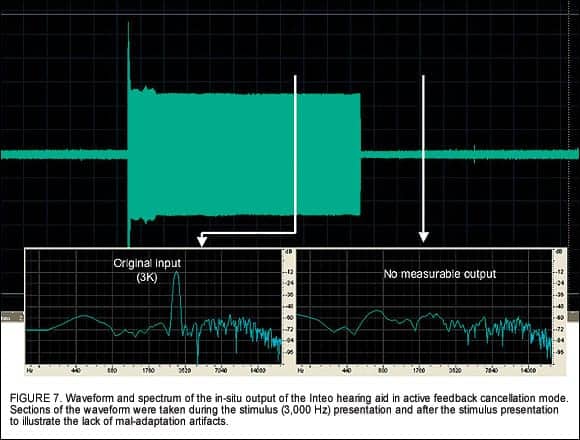
Figure 7 displays the real-ear recordings of the in-situ output of the Inteo (with active feedback cancellation “on”) with an open earmold during and after the presentation of a 3,000 Hz sinusoid. In contrast to Figure 3, which shows the presence of the mal-adaptation artifact, Figure 7 shows no trace of any feedback signal during the presentation of the input or of any feedback cancellation signal after the presentation of the input. These observations suggest that mal-adaptation is absent with the active feedback algorithm.
In summary, these data indicate that the Inteo multi-directional active feedback cancellation algorithm is effective in increasing the AGBF by as much as 15-18 dB, while at the same time being responsive to sudden changes in the feedback paths without creating artifacts under real-world conditions.
References
1. Kuk F, Ludvigsen C, Kaulberg T. Understanding feedback and digital feedback cancellation strategies. The Hearing Review. 2002;9(2):36-43.
2. Kuk F, Ludvigsen C.The real-world benefits and limitations of active digital feedback cancellation. The Hearing Review. 2002;9(4): 64-68.
3. Kuk F, Paludan-Muller. Noise management algorithm may improve speech intelligibility in noise. Hear Jour. 2006;59(4):62-65.
This article was submitted to HR by Francis K. Kuk, PhD, director of audiology, at the Widex Office of Research in Clinical Amplification (ORCA), in Lisle, Ill; Anders H. Jessen, BScEE, and Kristian T. Klinkby, MSEE, research engineers, and Lise B. Henningsen, MA, research audiologist, at Widex A/S, Vaerloese, Denmark; and Heidi Peeters, MA, and Denise Keenan, MA, research audiologists, at Widex ORCA. Correspondence can be addressed to Francis Kuk, Widex ORCA, 2300 Cabot Dr, Ste 415, Lisle, IL 60532; e-mail: [email protected].



